Plug-and-play ADMM for Photocurrent Mapping image reconstruction
This notebook demonstrates Plug-and-Play (PnP) ADMM image reconstruction for Photocurrent Mapping (PCM) data.
Starting from a high-resolution current map of a CIGS solar cell, subsampled
PCM measurements are simulated using the PhotocurrentMapOp operator. Several
reconstruction methods are then compared:
Zero-filled pseudo-inverse reconstruction.
Two compressed sensing baselines with a wavelet sparsity prior: FISTA with an \(\ell_1\) penalty and SPGL1.
PnP-ADMM with a pre-trained DRUNet denoiser as prior.
The goal is not to optimise performance, but to illustrate how classical sparse reconstruction methods and PnP can be combined with the LION operators for PCM.
Setup
Device configuration
Set the default device to a GPU if available. If multiple GPUs are present, the desired GPU index can be specified here.
import torch
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
torch.set_default_device(device)
Imports
Import the required libraries, including LION operators and reconstruction algorithms for PCM.
from datetime import datetime
from pathlib import Path
from typing import Callable
import deepinv
import matplotlib.pyplot as plt
import numpy as np
from jaxtyping import Float
from torchmetrics import PeakSignalNoiseRatio, StructuralSimilarityIndexMeasure
from LION.classical_algorithms import fista_l1
from LION.classical_algorithms.spgl1_torch import spgl1_torch
from LION.operators import CompositeOp, Wavelet2D
from LION.operators.DebiasOp import debias_ls
# LION imports
from LION.operators.PhotocurrentMapOp import PhotocurrentMapOp, Subsampler
from LION.reconstructors.PnP import PnP
GrayscaleImage2D = Float[torch.Tensor, "height width"]
Measurement1D = Float[torch.Tensor, "num_measurements"]
Define the data file paths
The example uses a single \(256 \times 256\) current map of a CIGS solar cell stored as a NumPy array. This image will serve as the ground truth in the experiments.
data_dir = Path("/home/t/Documents/GIT/LION/data/photocurrent_data")
# data_dir = Path("your/path/to/photocurrent_data")
assert data_dir.exists(), f"Data directory {data_dir} does not exist."
cigs_filename = "example_CIGS_256x256.npy"
assert (data_dir / cigs_filename).exists(), f"Data file not found in {data_dir}."
Set a directory to save logs and results
Each run is stored in a separate subdirectory named with the current date and time, which makes it easier to keep track of different experiments.
current_datetime_str = datetime.now().strftime("%Y%m%d_%H%M%S")
log_dir = Path("pcm_demo_output") / current_datetime_str
log_dir.mkdir(parents=True, exist_ok=True)
Experiment
Define a general function to run the photocurrent mapping reconstruction using a reconstruction method.
The helper function run_pcm_demo:
Builds the PCM operator and simulates subsampled measurements.
Computes the zero-filled pseudo-inverse reconstruction.
Runs a chosen reconstruction method given by
recon_fn.Reports PSNR and SSIM for both reconstructions, displays and saves the images.
Show plotting details
def show_images(
images: list[torch.Tensor],
fig_filepath: Path,
titles: list[str] | None = None,
suptitle: str | None = None,
) -> None:
"""Plot images."""
n_images = len(images)
_, axes = plt.subplots(1, n_images, squeeze=False, figsize=(n_images * 4, 4))
for i in range(n_images):
axes[0][i].imshow(images[i].detach().cpu().squeeze(), cmap="gray")
axes[0][i].axis("off")
if titles:
axes[0][i].set_title(titles[i])
if suptitle:
plt.suptitle(suptitle, x=0.4, y=-0.05, fontsize=16)
plt.savefig(fig_filepath, dpi=150)
def run_pcm_demo(
recon_method_name: str,
recon_fn: Callable[[PhotocurrentMapOp, Measurement1D], GrayscaleImage2D],
ground_truth_image: GrayscaleImage2D,
image_name: str,
J: int, # image size will be 2^J x 2^J
subtract_from_J: int = 1,
delta_divided_by: int = 4,
log_dir: Path | str = ".",
device: torch.device | str = "cuda:0",
):
N = 1 << J
im_tensor = torch.tensor(ground_truth_image).unsqueeze(0).unsqueeze(0) # (1,1,H,W)
coarseJ = J - subtract_from_J
delta = 1.0 / delta_divided_by
sampling_percentage = delta * 100
in_order_measurements_percentage = 1 / (1 << (subtract_from_J * 2)) * 100
print(f"Sampling rate: {sampling_percentage:.2f}%")
print(f"In-order measurements: {in_order_measurements_percentage:.2f}%")
subsampler = Subsampler(n=N * N, coarseJ=coarseJ, delta=delta)
pcm_op = PhotocurrentMapOp(J=J, subsampler=subsampler, device=device)
y_subsampled_tensor = pcm_op(im_tensor)
zero_filled_recon_tensor = (
pcm_op.pseudo_inv(y_subsampled_tensor).unsqueeze(0).unsqueeze(0)
)
recon_tensor = (
recon_fn(
pcm_op=pcm_op,
pcm_measurement=y_subsampled_tensor,
)
.unsqueeze(0)
.unsqueeze(0)
)
data_range = (im_tensor.max() - im_tensor.min()).item()
psnr = PeakSignalNoiseRatio(data_range=data_range).to(device)
ssim = StructuralSimilarityIndexMeasure(data_range=data_range).to(device)
psnr_zero_filled = psnr(zero_filled_recon_tensor, im_tensor)
psnr_recon = psnr(recon_tensor, im_tensor)
ssim_zero_filled = ssim(zero_filled_recon_tensor, im_tensor)
ssim_recon = ssim(recon_tensor, im_tensor)
show_images(
[im_tensor, zero_filled_recon_tensor, recon_tensor],
fig_filepath=Path(log_dir)
/ f"{image_name}_{recon_method_name}_sampling_percentage={sampling_percentage:.2f}_in_order_measurements={in_order_measurements_percentage:.2f}.png",
titles=[
"Original Image",
f"Zero-filled Reconstruction\nPSNR: {psnr_zero_filled:.2f} dB, SSIM: {ssim_zero_filled:.4f}",
f"{recon_method_name} Reconstruction\nPSNR: {psnr_recon:.2f} dB, SSIM: {ssim_recon:.4f}",
],
suptitle=(
"PCM Reconstructions Comparison\n"
+ f"sampling rate: {sampling_percentage:.2f}%, in-order measurements: {in_order_measurements_percentage:.2f}%"
),
)
Load the data.
The array cigs_raw_data is a single 2D image representing the current map
of the CIGS device. This will be used as the ground truth image for all
reconstruction methods.
cigs_raw_data: GrayscaleImage2D = np.load(data_dir / cigs_filename)
print(f"CIGS data shape: {cigs_raw_data.shape}")
CIGS data shape: (256, 256)
In the examples below:
J = 8so the image size is \(2^J \times 2^J = 256 \times 256\).delta_divided_by = 4corresponds to a sampling rate \(\delta = 1 / 4 = 0.25\), that is, 25% of the total measurements.subtract_from_J = 2keeps a central \(2^{J-2} \times 2^{J-2} = 64 \times 64\) block of in-order measurements, corresponding to 6.25% of the total; the remaining samples are taken in a compressed sensing fashion.
J = 8 # image size is 2^J x 2^J = 256x256
delta_divided_by = 4 # 25% sampling
subtract_from_J = (
2 # keep 2^{J-2} x 2^{J-2} = 64x64 in-order measurements, or 6.25% of the total
)
First experiment: PnP-ADMM on CIGS data
In this section the PCM PnP-ADMM algorithm is tested on the CIGS data.
Define the prior function using a pre-trained DRUNet denoiser and the corresponding Plug-and-Play ADMM solver.
DRUNet is a deep convolutional denoiser proposed by:
Kai Zhang, Yawei Li, Wangmeng Zuo, Lei Zhang, Luc Van Gool, and Radu Timofte, “Plug-and-Play Image Restoration with Deep Denoiser Prior,” IEEE Transactions on Pattern Analysis and Machine Intelligence, 44(10), 6360–6376, 2022.
In the PnP-ADMM framework, the proximal step of a regulariser is replaced by an off-the-shelf denoiser. Here DRUNet acts as a powerful learned prior for the PCM inverse problem, while the data fidelity term is handled by ADMM.
denoiser_DRUNet = deepinv.models.DRUNet(
pretrained="download", in_channels=1, out_channels=1, device=device
)
def denoiser_fn(x: GrayscaleImage2D) -> GrayscaleImage2D:
with torch.no_grad():
return (
denoiser_DRUNet(x.unsqueeze(0).unsqueeze(0), sigma=0.05)
.squeeze(0)
.squeeze(0)
)
def run_pnp_admm(
pcm_op: PhotocurrentMapOp, pcm_measurement: Measurement1D
) -> GrayscaleImage2D:
admm_iterations = 100
admm_step_size = 1e5
cg_max_iter = 100
cg_tol = 1e-7
print(
f"Running PnP-ADMM reconstruction: {admm_iterations} iterations, cg_max_iter={cg_max_iter}..."
)
pnp = PnP(physics=pcm_op, prior_fn=denoiser_fn, algorithm="ADMM")
return pnp.admm_algorithm(
measurement=pcm_measurement,
eta=admm_step_size,
max_iter=admm_iterations,
cg_max_iter=cg_max_iter,
cg_tol=cg_tol,
)
run_pcm_demo(
recon_method_name="PnP-ADMM",
recon_fn=run_pnp_admm,
ground_truth_image=cigs_raw_data,
image_name="cigs",
J=8, # image size is 2^J x 2^J = 256x256
delta_divided_by=4, # 25% sampling
subtract_from_J=2, # keep 2^{J-2} x 2^{J-2} = 64x64 in-order measurements, or 6.25% of the total
log_dir=log_dir,
device=device,
)
Sampling rate: 25.00%
In-order measurements: 6.25%
Running PnP-ADMM reconstruction: 100 iterations, cg_max_iter=100...
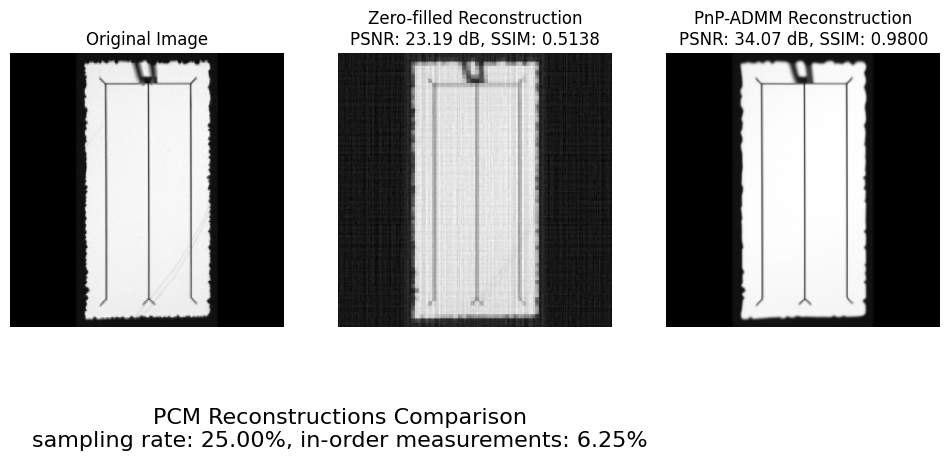
The code above runs the PnP-ADMM reconstruction and compares it to the zero-filled pseudo-inverse.
Although PnP-ADMM substantially improves PSNR and SSIM, it can smooth out fine-scale structures. In the context of defect detection, these small features can be crucial, so high PSNR and SSIM alone are not sufficient to guarantee that the reconstruction is fit for purpose.
In the next sections, two compressed sensing baselines with a wavelet sparsity prior are explored and compared to the PnP-ADMM result.
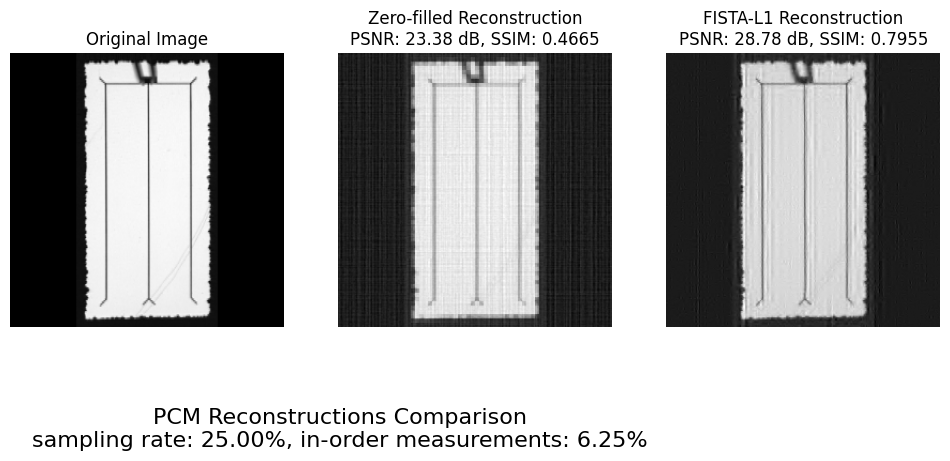
Compressed sensing baseline: FISTA with wavelet sparsity
This section applies FISTA with an \(\ell_1\)-penalty on wavelet coefficients as a classical compressed sensing baseline.
Let \(\Phi\) denote the PCM forward operator and \(\Psi\) a 2D wavelet transform with inverse \(\Psi^{-1}\). The composite operator \(A = \Phi \Psi^{-1}\) acts on wavelet coefficients \(w\). FISTA approximately solves the standard \(\ell_1\)-regularised problem
and the final current map is obtained as \(x = \Psi^{-1} w\).
An optional debiasing step is included at the end to reduce the bias induced by the \(\ell_1\) penalty on the active support.
def run_fista_l1(
pcm_op: PhotocurrentMapOp, pcm_measurement: Measurement1D
) -> GrayscaleImage2D:
lam = 10 # Good for Daubechies 4 wavelet transform
max_iter = 1000
tol = 1e-5
debias_max_iter = 10 # TODO: Debiasing seems to not make much difference here
debias_support_tol = 1e-5
debias_tol = 1e-7
height, width = pcm_op.domain_shape
# Wavelet transform Psi
wavelet = Wavelet2D((height, width), wavelet_name="db4", device=device)
# Composite operator A = Phi Psi^{-1}
A_op = CompositeOp(wavelet, pcm_op, device=device)
print("Running FISTA reconstruction: " f"{max_iter} iterations, lambda={lam}...")
w_hat = fista_l1(
op=A_op,
y=pcm_measurement,
lam=lam,
max_iter=max_iter,
tol=tol,
L=None,
verbose=False,
progress_bar=True,
)
# Optional debiasing
print(f"Running debiasing: {debias_max_iter} iterations...")
w_debias = debias_ls(
op=A_op,
y=pcm_measurement,
w=w_hat,
support_tol=debias_support_tol,
max_iter=debias_max_iter,
tol=debias_tol,
progress_bar=True,
)
# Current map reconstruction
cs_result_tensor = wavelet.inverse(w_debias)
return cs_result_tensor
run_pcm_demo(
recon_method_name="FISTA-L1",
recon_fn=run_fista_l1,
ground_truth_image=cigs_raw_data,
image_name="cigs",
J=8, # image size is 2^J x 2^J = 256x256
delta_divided_by=4, # 25% sampling
subtract_from_J=2, # keep 2^{J-2} x 2^{J-2} = 64x64 in-order measurements, or 6.25% of the total
log_dir=log_dir,
device=device,
)
Sampling rate: 25.00%
In-order measurements: 6.25%
Running FISTA reconstruction: 1000 iterations, lambda=10...
Running debiasing: 10 iterations...
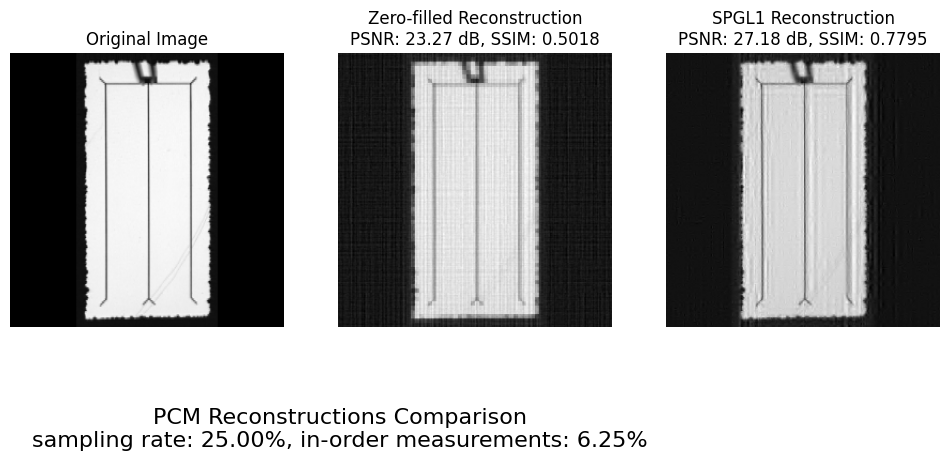
Compressed sensing baseline: SPGL1 with wavelet sparsity
This section applies the SPGL1 algorithm as a second compressed sensing baseline, again using a wavelet sparsity prior in the same setting \(A = \Phi \Psi^{-1}\).
SPGL1 is a spectral projected gradient method that efficiently solves large-scale \(\ell_1\)-regularised problems and basis pursuit denoising formulations. In this example it is run with default parameters suitable for the PCM problem size, followed by the same optional debiasing step used for FISTA.
def run_spgl1(
pcm_op: PhotocurrentMapOp, pcm_measurement: Measurement1D
) -> GrayscaleImage2D:
lam: float = 1e-3
max_iter = 1000
tol: float = 1e-4
debias_max_iter = 10
debias_support_tol = 1e-5
debias_tol = 1e-7
height, width = pcm_op.domain_shape
# Wavelet transform Psi
wavelet = Wavelet2D((height, width), wavelet_name="db4", device=device)
# Composite operator A = Phi Psi^{-1}
A_op = CompositeOp(wavelet, pcm_op, device=device)
print("Running SPGL1 reconstruction: " f"{max_iter} iterations, lambda={lam}...")
w_hat = spgl1_torch(
op=A_op,
y=pcm_measurement,
iter_lim=max_iter,
verbosity=0,
opt_tol=tol,
)
# Optional debiasing
print(f"Running debiasing: {debias_max_iter} iterations...")
w_debias = debias_ls(
op=A_op,
y=pcm_measurement,
w=w_hat,
support_tol=debias_support_tol,
max_iter=debias_max_iter,
tol=debias_tol,
progress_bar=True,
)
# Current map reconstruction
cs_result_tensor = wavelet.inverse(w_debias)
return cs_result_tensor
run_pcm_demo(
recon_method_name="SPGL1",
recon_fn=run_spgl1,
ground_truth_image=cigs_raw_data,
image_name="cigs",
J=8, # image size is 2^J x 2^J = 256x256
delta_divided_by=4, # 25% sampling
subtract_from_J=2, # keep 2^{J-2} x 2^{J-2} = 64x64 in-order measurements, or 6.25% of the total
log_dir=log_dir,
device=device,
)
Sampling rate: 25.00%
In-order measurements: 6.25%
Running SPGL1 reconstruction: 1000 iterations, lambda=0.001...
Running debiasing: 10 iterations...